TEACHING MATERIAL
LECTURE SLIDES
- Humanoid Soccer Robots (it05)
- Digital Position Control for Analog Servos (Motion--HSR06_Control)
- Human-Like Walking using Toes Joint and Straight Stance Leg (Motrion_Behnke)
- See, walk, and kick: Humanoid robots start to play soccer (Motion-Humanoids06_Behnke)
- Soccer Behaviors for Humanoid Robots (HSR-113)
- Online Trajectory Generation for Omnidirectional Biped Walking (Excellent-Motion-01641935)
- Getting Back on Two Feet: Reliable Standing-up Routines for a Humanoid Robot (Motion-IAS9)
- Instability Detection and Fall Avoidance for a Humanoid using Attitude Sensors and Reflexes (Motion-IROS06_Renner_Behnke)
- Stochastic Optimization of Bipedal Walking using Gyro Feedback and Phase Resetting (Gyroscop-Motion)
- Playing Soccer with RoboSapien (RS05_RoboSapien)
- Toni: A Soccer Playing Humanoid Robot (RS05_Toni)
- Towards a Humanoid Museum Guide Robot that Interacts with Multiple Persons (01573603)
- Multi-Cue Localization for Soccer Playing Humanoid Robots (Monte-Carlo_Localization)
- Hierarchical Reactive Control for Soccer Playing Humanoid Robots (ISBN978-3-902613-07-3mrmi33_2)
- Robot Competitions Ideal Benchmarks for Robotics Research (IROS06WS_Benchmarks_Behnke)
- Monte Carlo Localization: Efficient Position Estimation for Mobile Robots (fox-Monte-Carlo-localization.aaai99)
- Kondo humanoid robot software and hardware manuals.
LECTURE NOTES ON ROBOT ARM
SOME ROBOCUP'07 PARTICIPATING TEAMS REPORTS
COURSE PROJECT AREA
- Task-1: SimRobot provides a useful working environment with simulated vision and possibly some tools for behavior programming. Please follow the steps below:
- Step-1: download the SimRobot Simulator (See URL below), attached files, and sample programs, etc, and check its running without errors as described in the papers posted on SimRobot at course web. In the case of configuration problems or others, please interact through emails with the author (with cc to me) and try to have a working system as soon as possible.
- Step-2: investigate which environment (Windows, Unix, etc) is the most appropriate for student work if more than one option is available. There is need to try more than the simple Windows environment!
I suggest the following group organization: one or two weekly meeting. The meeting is for discussion and computer work coordinated by a group coordinator. In each meeting we need to analyze any progress made, distribute some needed tasks, and write a short meeting minutes to be send to the members with cc to me to follow up.
- Simulator papers and URL:
- Task-2: Examine the XABSL code for the soccer game as follows:
- Investigate the XABSL and its ASCII soccer game (simulator) as described in paper: /COE/mayez/ps-coe484/core/COE484-Behaviors/04059236.pdf
- The XABSL code can be downloaded from URL: http://www2.informatik.hu-berlin.de/ki/XABSL/
- The XABSL code for the soccer game (4x4) that is using the ASCII simulator at: http://www2.informatik.hu-berlin.de/ki/XABSL/examples/ascii-soccer/
- CMU developed this ASCII soccer simulator, at URL: http://www.cs.cmu.edu/~trb/soccer/
- For a detailed documentation on XABSL, here is the URL to the complete GT 2004 source code (Options and Basic Behaviors): http://www2.informatik.hu-berlin.de/ki/XABSL/examples/gt2004/options.html
- The above simulator was used by the author of XABSL (PhD thesis from /COE/mayez/ps-coe484/core/COE484-Behaviors/diploma-thesis.pdf) to work with behavior programming.
- See: Migrating XABSL bahvior from 4-legged league to humanoid league.
- Step:Although the ASCII "simulator" appears to be very elementary it may be sufficiently good to test the behavior programming in XABSL. This might allow to develop behaviors independently from a vision and localization which could be acceptable working environment if no better alternative is found. Please download the code at above URLs and check the list of references from the above documentation in order to find some working examples. The paper reference a 4x4 soccer game that uses the ASCII simulator based on XABSL. Results of your investigation are to be sent to the instructor.
- Task-3: Designing the Kondo two legs geometric model and humanoid walking on SimRobot. The Task is coordinated by Mr. MOHAMAD SHAHAB(227598). Students joining this task will receive points for their work.The task includes the following steps:
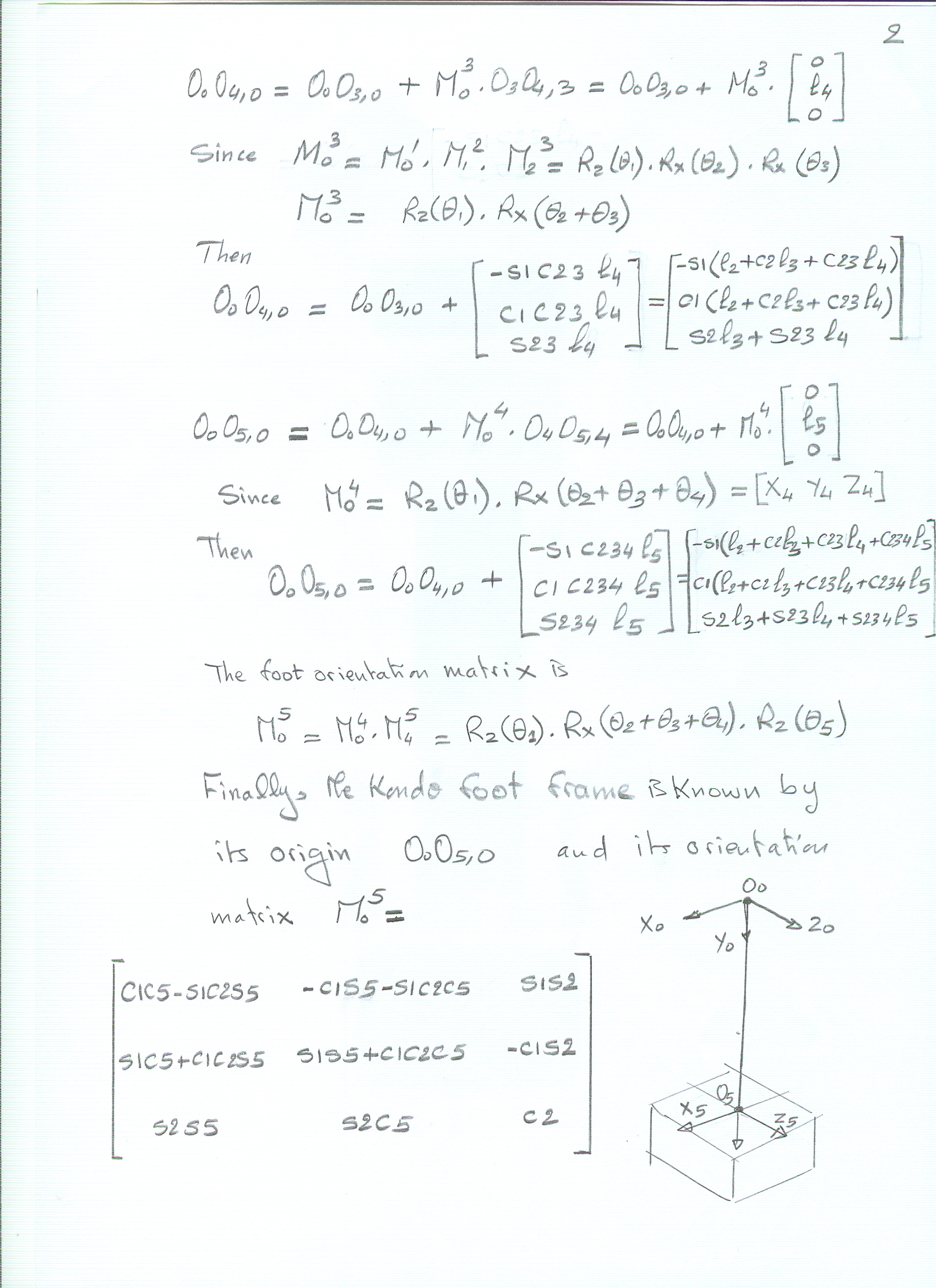
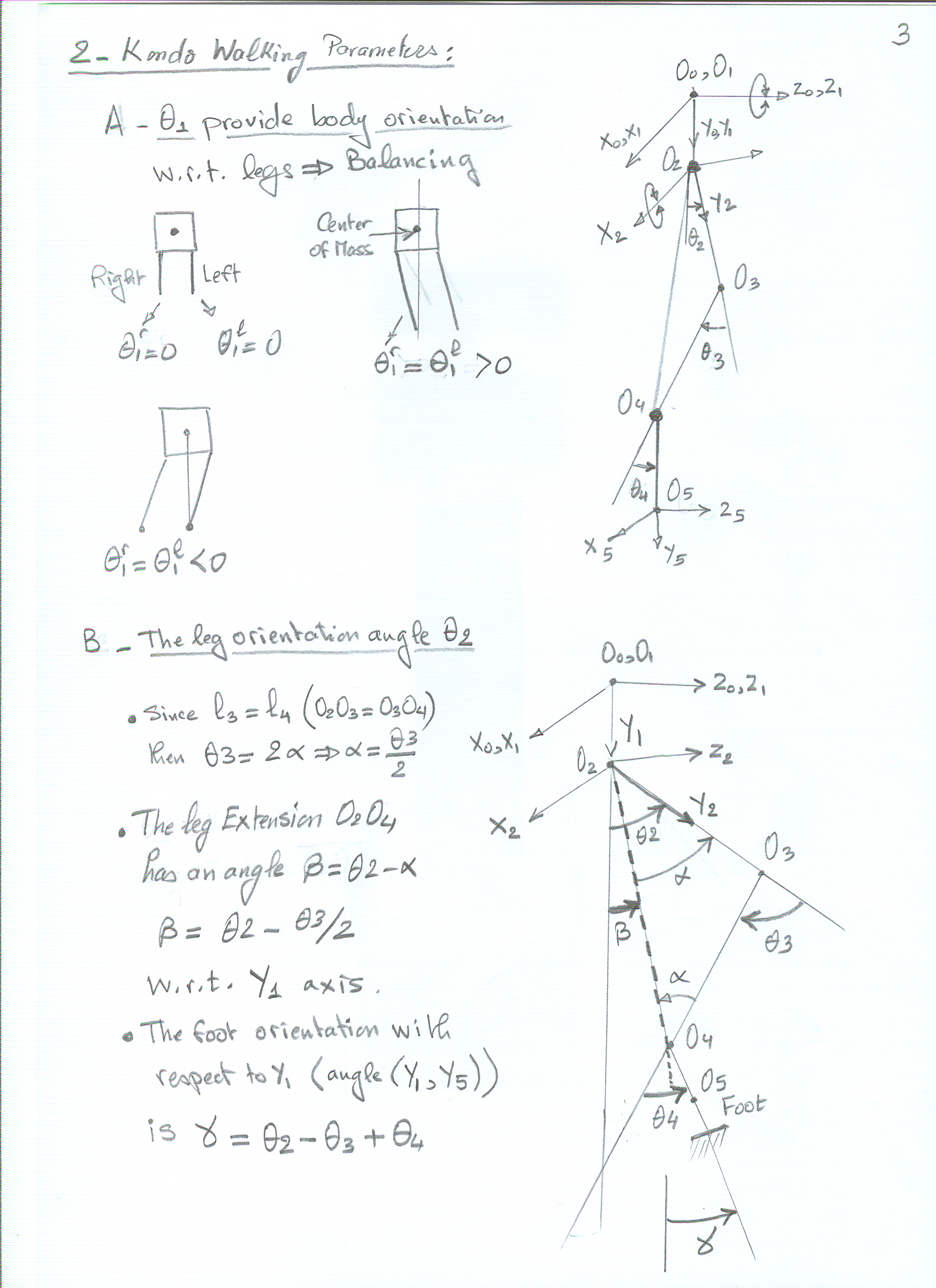
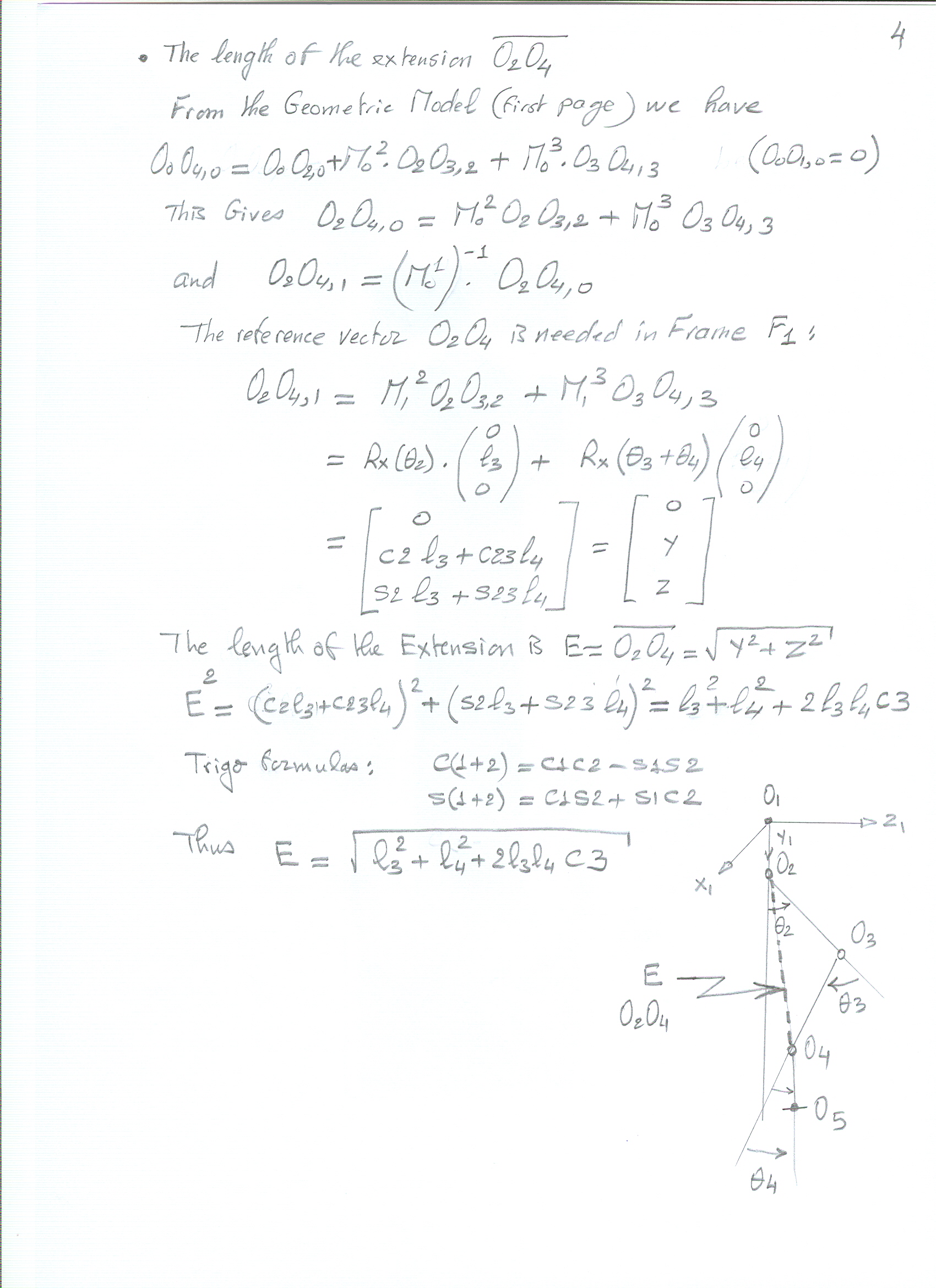
Design of the geometric structure of a 5-dof (Rz, Rx, Rx, Rx, Rz) serial arm (leg). and experience its motion using SimRobot. Set up one end of the 5-dof as fixed on the field and the other end is free. Experience the leg motion using SimRobot.
Create a 2-leg geometric structure where each leg is the previous 5-dof structure. Attach the two legs to a cylindrical body. The leg foots are free and the other end is attched to the body. Experience the legs motion using SimRobot.
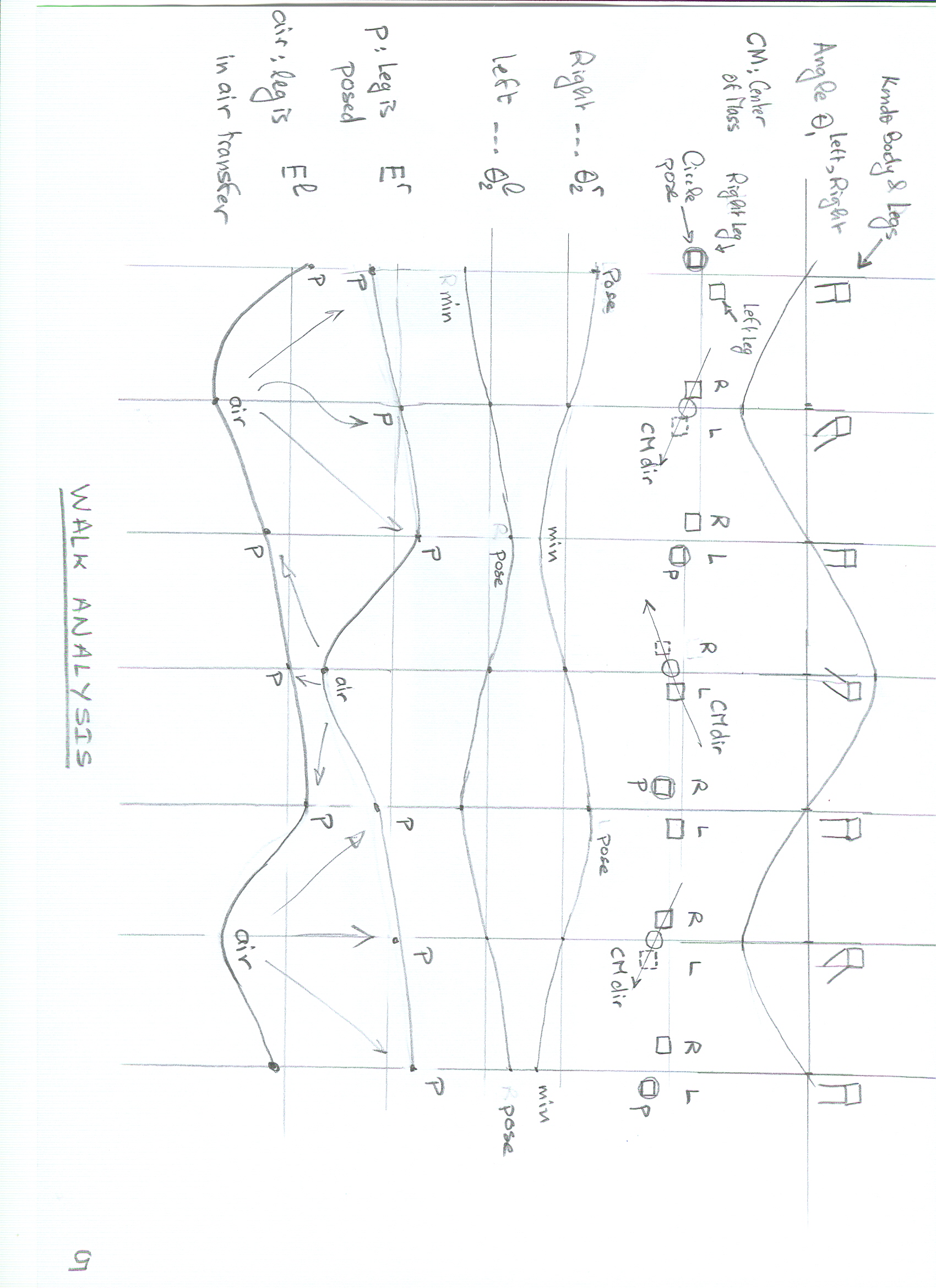
Design a simple foot motion for the two legs so that the body appear as serially attached to the foot which is posed on the field. Use appropriate parameters to control the walking of the humanoid.
A short report and a presentation is required. Each participating student will be graded out of 10 points project (the project weight is 50 points). The students continue this project as their own project by improving the model and the walking humanoid using SimRobot.
Present (PPT) to our class all the above results by Monday, March 31th, 2008.
- Task-4: Analysis of SimRobot software Architecture. The Task is coordinated by Mr. SALAM REFAI (208602). Students joining this task will receive points for their work. The task includes the following steps:
- Analyze the working GT2004 implementation on SimRobot (4-legged) with respect to software Architecture and finding out how all various modules are integrated within SimRobot,
- Present a Read-Map for all the associated code module like the vision, localization, and behavior and their corresponding programs and directories (use of a one-to-one mapping of code and directory to existing GT2004 Diagram to help searching for a program and to facilitate overall understanding),
- Examine GT2004-SimRobot can be used as a test-bed for Research. For this we need to examine to what extent it is possible to modify the configuration of GT2004-SimRobot. Investigate the possibility of modifying the configuration such as disabling or discarding the XABSL module (Engine and XML) and use of ball parameters which results from Vision and Localization in the design of a simple reactive controller like "move to ball". Run the new controller using SimRobot and see if it is effectively using the vision and localization at each iteration of its motion and whether its reactive controller is operating properly.
- Present (PPT) to our class all the above results by Wednesday Second of April, 2008.
- Task-5: Analysis of Self-Localization for Soccer. This Task is a course project conducted by Mr. MOHAMAD SHAHAB(227598) and Mr. SALAM REFAI (208602). The action plan consists of: (1) literature survey of Self-Localization Methods (SL) such as the Monte-Carlo used in GT 2005, other participating Robocup teams, and general contributing papers, (2) present a comparison of SL methods while focusing the comparison on the methodology, the processing time and complexity in view of the real-time constraints, (3) suggesting improvements on the focusing areas, and (4) carry out some simulation (if possible). The requirements are: (1) Students are required to interact with the instructor to get feedback of their work, (2) deliver presentations to obtain feedback, and (3) provide a final report at end of semester. PPT for the First Presentation (first week of May).
- Task-6: Analysis of Behavior Programming of GT 2005 and Adaptation to the Humanoid League This Task is a course project conducted by AL NASSER, MOHAMMAD (207086). The action plan consists of: (1) literature survey of Behavior Programming Methods (BPM) such as the XABSL used in GT 2005, MSF Robotic Studio, the ASCII simulator as a tool for behavior programming, BPM from other participating Robocup teams, and general BPM contributing papers, (2) present a comparison of above methods while focusing the comparison on what Behaviors are needed and programming for Soccer game, (3) analysis of GT2005 BPM, and (4) suggest and implement modifications to convert fro 4legged league to humanoid.The requirements are: (1) Student is required to interact with the instructor to get feedback of his work, (2) deliver presentations to obtain feedback, and (3) provide a final report at end of semester. Presentations: None as of 10 of May 2008.
- Graduate Students are requested to read assigned paper on "Humanoid Bipedal Motion" and prepare a ppt presentation due on March first, 2008:
- AL NASSER, MOHAMMAD (207086) and SHAHAB, MOHAMAD (227598). Paper from: Stochastic Optimization of Bipedal Walking using Gyro Feedback and Phase Resetting (Gyroscop-Motion) Presentation delivered by above students
- AL-ZAMEL, ABDULLAH (204698), AL-QUNAIEER, FARES (201849), Paper from: Online Trajectory Generation for Omnidirectional Biped Walking (Excellent-Motion-01641935)
- AL-JAMAAN, HAMOUD (260296), ALREFAI, SALAM (208602). Paper from: Human-Like Walking using Toes Joint and Straight Stance Leg (Motrion_Behnke)
Guidelines to prepare paper presentation:
- Focus on the technical aspects of each paper with short introduction of corresponding literature review. Make sure it will be clear for a Senior-level student.
- The body of the ppt presentation is to refer to the presented methods with their mathematical derivation and performance issues.
- The presentation will be presented in the class by the assigned students. Each presentation will be 30 minutes but may contains more details for later student reference.
- The ppt will be posted as part of course material.
- Graduate Course Project Description (Humanoid-Behavior): The objective is to develop a working humanoid Behavior Graph in XABSL by using the available GT2004 XABSL Behavior for the four-legged league. The major input is being the GT2004/2005 XABSL code for soccer game. The suggested steps are: (1) Analyze the GT2004/2005 XABSL code for soccer and deliver one presentation, (2) convert XABSL code from 4-legged description to humanoid description and deliver one presentation, (3) show that the synthesized XABSL behavior graph for humanoid properly runs and works using the SimRobot, (4) as an option in this project, develop a visual technique (drag-and-drop) to simplify the task of defining a behavior graph for soccer game. A report, demo, and a presentation are required.
- Graduate Course Project Description (Humanoid-Vision&Localization): The objective is to develop an (1) optimized low-level vision module to classify all soccer scene elements such as field lines and circle, goal frame, beacons, ball, and other robot and associate corresponding recognition parameters to each percept and deliver a presentation, (2) implement on the top of previous recognition module a randomized self-localization technique which uses the percept recognized locations and produce an accurate estimate of robot location (deliver a presentation), (3) performance evaluation of vision and self-localization. Students need to well aware of real-time constraints and the need to minimize processing as much as possible without compromising quality and accuracy of identified parameters. A report, demo, and a presentation are required.
- Undergraduate Course Project Description (Geometric modeling of two legs in SimRobot): The objective is to use SimRobot to (1) program the geometric structure of the Kondo two legs where each consists of five degrees of freedom that needs to be modeled as cubes or cylindrical poly-hederal structure, (2) arrange each of the links according to course defined class material (Summary for Kondo Humanoid: slides First, Second, Third, Fourth, and Fifth), and (3) use of SimRobot to move each leg based on the leg angles, and (4) use of control parameters (see material above) to generate a walking motion. A report, demo, and a presentation are required.
PRESENTATIONS ON ROBOTICS
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}