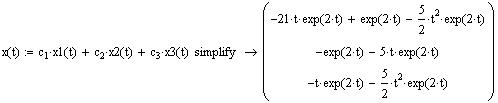
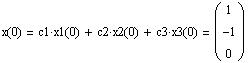
c) Find a particular solution satisfying the initial
condition
Compute the RHS and compare it with the LHS
Define the components of the derivative of the solution
b) Verify that the general solution satisfies the system
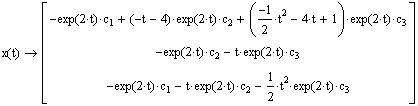
Display the general solution
Define the general solution
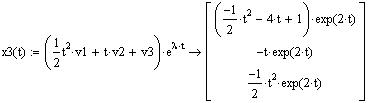
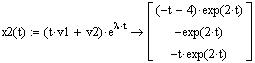
Define and compute the second solution
Define and compute the second solution
Define and compute the first solution
We have to redefine the general solution using different
constants.
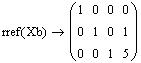
Compute the rref of the aug. matrix
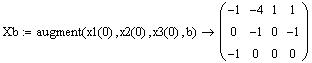
Create the augmented matrix and name it Xb
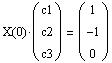
Define the vector with initial conditions
where X(0) is the matrix with columns x1(0), x2(0)
and x3(0). Thus, to solve the system we form the augmented
matrix [ x1(0) x2(0) x3(0) | b ] , where b =

and compute its rref
To find the constants c1, c2 and c3, we need to solve
the nonhomogeneous system
To find the e-vectors, we need to solve for v
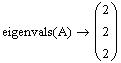
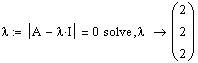
Or, by using the eigenvals command
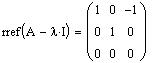
Compute the eigenvalues by solving the characteristic
equation
Define the 3 x 3 identity
Remark
This worksheet can be used to solve any system with
an eigenvalue having multiplicity 3 and defect 2.
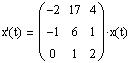
Example
(Problem 25) Multiplicity 3, defect 2
Use v2 to computer v1 provided that v1 is not the zero
vector
Use v3 to computer v2 provided that v2 is not the zero
vector
all three components of v3 are arbitrary
So, we find v3 by solving the system
From the rref we notice that the e-value is able to
produce only one e-vector. That is, the e-values is
defective with defect equals 2