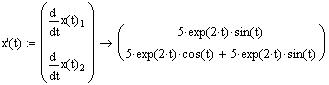
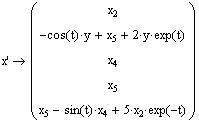
Compute the right-hand side of x' = A x
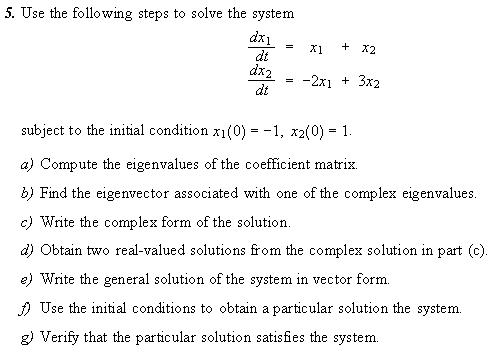
g) Compute the left-hand side of the differential system
x' = A x
Therefore, the particular solution is given by
Equate the corresponding components of the solution
at 0 and the initial conditions, then solve for c1
and c2
Evaluate the solution at 0
Define the initial condition
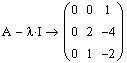
Since (A - l
I)3
= 0 ==> when we solve for system (A - l I)3
v3 = 0 for v3, we three free variables. to choose
for the components of v3.
Define the 3 x 3 identity matrix as I
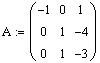
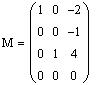
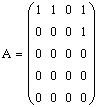
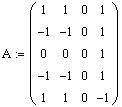
a) Define the coefficient matrix
//////////////////////////////////////\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
Solve for the components of the e-vector
Mathcad: Reset
the variables v1 and v2
b) Choose one of the e-values
Find the roots of the char. equation
f) Evaluate the general solution at the initial point
(0) and set it equal to the initial condition
e) Form the general solution
Extract the imaginary part of the complex solution to
obtain the second real-valued solution
Extract the real part of the complex solution to obtain
the first real-valued solution
d) Write the complex solution in terms of sine and cosine
c) Form the complex solution
Therefore, the e-vector is
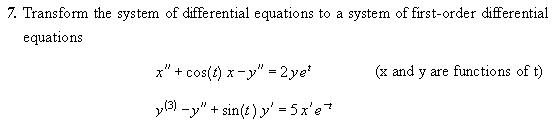
8.
If possible, give examples of a reduced row echelon
form of the augmented matrix of a linear system with
the given conditions. If not possible, write "impossible"
as an answer.
g) homogeneous system with 3 equations in 4 unknowns
that has no solution
f) nonhomogenous system with 3 equations in 4 unknowns
that has no solution
e) homogeneous system with two equations in 3 unknowns
that has a only the trivial solution
d) nonhomogenous system with 3 equations in 3 unknowns
that has infinite number of solutions
c) nonhomogeneous system with 4 equations in two unknowns
that has infinite number of solutions
b) non homogeneous system with 4 equations in two unknowns
that has a unique solution
a) nonhomogeneous system with 4 equations in two unknowns
that has no solution
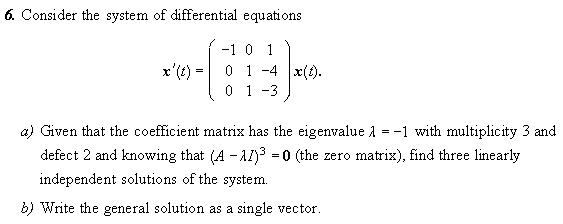
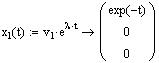
Create the three linearly independent solutions
(which is not the zero vector)
(which is not the zero vector)
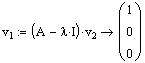
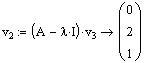
Compute the second e-vector
With the above choices for the components v3, we got
v2 to be the zero vector which is not acceptable since
we are looking for a nonzero eigenvector. Therefore,
we change our choices for the components of v3
Compute the second e-vector
Solve for the highest derivative
Mathcad: Reset
the variables
//////////////////////////////////////\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
Write the general solution
Mathcad
: Reset the variables c1 and c2
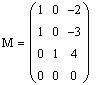
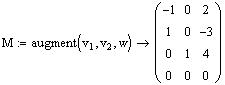
Create the augmented matrix
The vector w will be a solution if we can find constants
c1 and c2 such that w = c2 v1 + c2 v2
is a solution or not. Do not use substitution.
f) Show whether the vector
Since the basis has two vectors
e) Give the dimension of the solution space
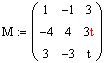
Create the augmented matrix of the system
a) Determine t so that the system is consistent
2
. Given the linear system
//////////////////////////////////////\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
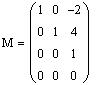
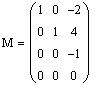
w is not a solution because the there is a leading
entry in the last column of the row reduced echelon
form of the augmented matrix [v1 v2 | w]
g) Give the reason for which w is or is not a solution
to the system.
The rref of the augmented matrix has a leading entry
in the last column. Therefore, w is not a solution.
c)
Use the rank of A and the number of unknowns to compute
the number of free variable in the solution of the
Remark:
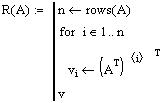
The small Mathcad program below defines a function R(A),
where A is any matrix. R(A)i
returns the ith row of matrix A. It is used, along
with the command stack
to illustrate the step-by-step reduction of a matrix.
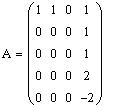
a)
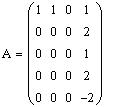
Compute the row reduce ech
elon form of A.
1.
Given the homogenous linear system A x = 0, where
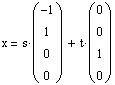
Therefore, with the choice of s = 1 and t = 1, a basis
for the solution space is:
d) Find a basis for the solution space of the system
//////////////////////////////////////\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
Compute the general solution:
Define the general solution:
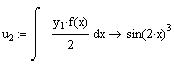
Simplify the particular solution:
Compute the particular solution:
Define the particular solution:
Compute the characteristic equation
Define the 2 x 2 identity matrix as I
a) Define the coefficient matrix
//////////////////////////////////////\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
Modified form of the particular solution
To avoid repeating the terms that appear in the complementary
solution, we modify the above form by multiplying the
appropriate terms by x raised to the power equal to
the multiplicity of the root that produced the terms.
b) find the form of the particular solution if the differential
equation is to be solved by the method of undetermined
coefficients.
a) write the complementary solution
4. Given that 0, 0, -1+2i, -1-2i, -1, -1 are the roots
of the characteristic polynomial of the differential
equation
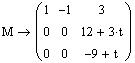
b) Determine t so that the system is inconsistent
This is not possible. t can not be simultaneously equal
to -4 and 9. Therefore, the system is not consistent
for any value of t.
For the system to be consistent, t must simultaneously
satisfy the two equations
Compute the rref of the matrix M
Remark:
The Mathcad program R(A) written above does not work
with non constant matrices. Instead, we define the
rows separately as follows:
Define the two solutions:
Write the complementary solution:
Find the roots of the char. eqn.
Mathcad: Reset
the variable x
3
. Use the method of variation of parameters to find
the general solution of the differential equation
y'' + 4y = 12 sin2(2x)
//////////////////////////////////////\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
From part (a), the system is inconsistent for all values
of t. That is, for t e
(-Ą,
Ą)