Theorem 4.4.2
If S and T are two bases for a vector space V, then
Thus, S does not span R4
even though the vectors in S are linearly independent.
However, we can not express the vector

as a linear combination of the given vectors.
These vectors are clearly linearly independent in R4.
Question:
Is it possible for a set to be linearly independent
and not span a vector space?
Answer: Yes (see example below).
Example 4.4.7
Thus, the vectors span R3
even though they are linearly dependent.
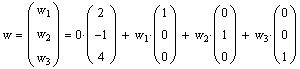
be a vector in R3
. Then w can be written as a linear combination of
the vector in S as follows
Then S is linearly dependent since it contains more
than 3 vectors.
Question:
Is it possible for a set to span a vector space even
though it is not linearly independent?
Answer: Yes (see example below).
Example 4.4.6
Theorem 4.4.3
Let S be a subset of an n-dimensional vector space V.
Then
a) If S is linearly independent and it has n vector
then S is a basis for V
b) If S spans V and it has n vectors then S is a basis
for V
c) If S is linearly independent, then it must be a subset
of some basis for V
d) If S spans V, then it contains a basis for V.
The following theorem relates the ideas of linear independence,
spanning sets, and basis for a vector space.
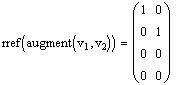
Here we have
number of leading entries = 2 and number of vectors = 2
Therefore, they are linearly independent and they form
a basis for the solution space W.
That is, v1
and v2
span the solution space, and we have W = span {v1, v2
} . Now, for the two vectors to be a basis for W, they
must be linearly independent To find out if they are
linearly independent or not, we compute the rref [
v1 v2]
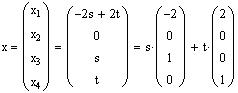
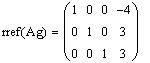
Therefore, all solutions of the system are linear combinations
of the vectors
Let x2 =
s and x4
= t ==> x1
= - 2 x2
+ 2 x4 =
- 2s + 4t and x3
= 0
Thus, x2
and x4 are
arbitrary
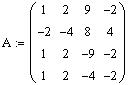
Example 4.4.5
Find a basis for the solution space of the linear system
A x = 0, where
Recall that the solution space W of the homogenous system
A x = 0 is a subspace of the vector space Rn
. If the system has only the trivial solution then W
= {0}.
If the system has infinitely many solutions then we
look for a bases for the subspace W such that all solutions
of the system can be expressed as a linear combination
of the the bases vectors.
Bases for Solution Spaces of homogenous systems
Remark
Recall that V = {0} is a vector space
(by the definition of a vector space)
In this case dimV = 0 since V has no
linearly independent set of vectors.
dimRn
= n since there are n vectors in any basis
for Rn
Definition 4.4.2
The number of vectors in a basis for a vector space
V is called the dimension
of V and is
denoted by dimV. If the number of vectors in the basis
is finite then the vector space is called a finite-dimensional
vector space, otherwise it is called an infinite-dimensional
vector space.
Example 4.4.4
number of vectors in S = number of vectors in T
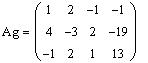
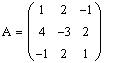
Form a matrix A with the given vectors as columns
To show that the vectors form a basis, we only need
to show that they are linearly independent (using Theorem
4.4.1).
Example 4.4.2
Show that the vectors
Theorem 4.4.1
Any set of n linearly independent vectors in Rn forms a basis for Rn
Proof
Let S = {v1,
v2, ...., vn
} be a set of n linearly independent vectors in Rn
Since they are linearly independent we only need to
show that they span Rn
Let w be a vector in Rn
and recall the theorem that says any set of more than
n vectors in Rn
is linearly dependent. Thus, the set {w, v1, v2
, ...., vn
} is linearly dependent.
==> there are constants c, c1
, c2,....,
cn not all zeros such that
cw + c1 v1 + c2
v2 +
.....+ cn vn = 0
The constant c could not be zero, otherwise there should
be another constant not equal to zero and this will
lead to the conclusion that the vectors v1, v2
,... , vn
are linearly dependent ( contradicting our assumption).
Since c �
0, we can divide by it to solve for w:
.
Thus, any vector w in Rn
can be written as a linear combination of the vectors
v1, v2, ...., v
n.
==> S spans R
n.
The set { e1,
e2, ...en } is called the standard basis
for Rn.
This shows that any vector in Rn can be written as a
linear combination of the these vectors. Thus, they
span Rn
2. Let

be any vector in

, then w can be written as a linear combination of the
vectors
e1,e2, ..., en
as follows:
w = w1 e1 + w2
e2 +
....+ wn en
form a basis for the vector space R
n because:
1. The vectors are linearly independent ( det [v1, v2
, ..., vn]
= 1 �
0 )
The standard unit vectors
Example 4.4.1 (standard bais for Rn )
That is, every vector w in V can be written uniquely
( because of the linear independence of the vectors)
as a linear combinations of the vectors in S. If w
is a vector in V, then there are constants c1, c2
, ..., ck,
such that
w = c1 v1 + c2
v2 +
.....+ ck vk
These constants are unique in the sense that w can not
be written in any other way.
Definition (basis
)
A set S = {v1,
v2, ..., vk
} of vectors in a vectors space V is called a basis
if
a) the vectors in S are linearly independent
b) the vectors span V.
4.4 Bases and Dimension of Vector Spaces:
Compute the reduced row echelon form
Form the augmented matrix of v1
, v2,
v3 and w
To express w as a linear combination of the vectors
v1, v2, v3
we need to find the constants c1, c2
and c3 such
that
w = c1 v1 + c2
v2 +
c3 v3
That is, we need to solve the nonhomogeneous linear
system A c = w
Example 4.4.3
Express the vector

as a linear combination of the vectors in the previous
example.
Question:
Can you think of another way to show that the vectors
form a basis for R3?
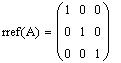
Since the rank of A is 3 and the number of vectors is
3 ==>
number of free variables = 3 -
3 = 0
That is, there are no free variables ==> the system
A c = 0 has only the trivial solution ==> the
vectors are linearly independent ==> they form a
basis for Rn.
(using Mathcad rank( ) command)
Another way to find if the vectors are linearly independent
or not is to compute the rank of A and compare it with
the number of vectors (columns of A)
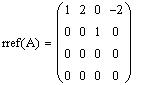
The reduced matrix has 3 leading entries which is equal
to the number of vectors. Thus the linear system A
c = 0 has only the trivial solution
==> the vectors are linearly independent ==>
the vectors form a basis for R3
.
Compute the reduced row echelon form of A
Compute the reduced row echelon form of A
Result of the augment command
Augment the vectors in a matrix named A