First 1-4 weeks of semester: Students are expected to independently carry out literature Survey on their selected topics, compile information of relevant papers in a progress report PR-1, have an action plan on their project implementation, and prepare for a presentation. During this period, the student is expected to carry out literature survey of no less than 4 technical papers on his project topic, interact with the instructor regarding the major issues of his project, and present the literature survey and planned implementation for the next phase. A 15-minute presentation is to be given in week 5 of the semester in front of the class students and course instructor. This part will be rated 25% of project for both presentation and timely submission of PR-1.
From week 5 to week 10, Students are expected to carry out the implementation part of their project by taking into account: (1) his presented or revised action plan, and (2) the instructor observations formulated during or after his presentation. During this period, the student is expected to interact with the instructor regarding the major design issues, difficulties in addressing some parts, resource problems, or any kind of problem that require specific attention to avoid negative impact on the project. Prepare report PR-2 after adding the implementation aspects presented above to P-1. A 15-minute presentation involving success and failure design and implementation aspects is to be given in week 11 in front of the class and instructor. This part will be rated 35% of project for both presentation and timely submission of PR-2.
From week 11 to week 14, Students are expected to carry out: (1) debugging and testing of their implementation and refer to instructor in case of problems, (2) carry out performance evaluation of the project with data collection, (3) revise PR-1 by including the performance evaluation and detailed analysis of collected results, (4) prepare the final project presentation. During this period, the student is expected to interact with the instructor regarding the debugging issues and performance interpretation. A presentation involving overall project will be delivered by the team (or student) before the last day of classes (week 15). The emphasis should be here on the method and results. This part will be rated 40% of project for both presentation and timely submission of PR-3 which is the final report. Here the student is to submit a zipped folder including all of original word reports (not pdf), well documented source code, evaluation data, and reference papers. A demo to the instructor will also be required.
List of projects
The literature survey should
focus on following topics: (1) review of dynamic execution micro-architectures
(DEMA), (2) resolution of hazards in DEMA, and (3) methods of code restructuring
for increasing ILP. The students will prepare presentations as stated in
the Course Projects Working Framework. Investigation of the DLX simulator with
respect to (1) take a code like ADI code, write it in C, generate its code in
DLX, and collect its run time, (2) restructure the DLX ADI assembly to the best
you can, run it, and compare its performance to the compiled version, (3) Try
loop unrolling and compare performance. The above operation can be repeated for
other code like the Ocean Red-Black, Solving a system of linear equations using
Jacobi, etc. Based on the above experience, the student may advice a method for
compiler loop restructuring such as the use of loop unrolling. Explain the
compiler approach with respect to a source code in DLX and give example.
Suggested implementation:
1.
Consider a set (say 5)
of small programs (computation loops) like the (1) Alternating Direction
Integration (ADI), (2) the Red-Black Relaxation loop, (3) 2D Matrix Multiply,
(4) Ocean Red-Black, and (5) Solving a system of linear equations using Jacobi.
2.
Carry out recurrence
analysis of each loop and classify it as LID, B-LCD, and F-LCD.
3.
Restructure the loop
to minimize its execution time using the loop unrolling and software pipelining.
4.
Run each of the above
programs without restructuring, with loop unrolling (possibly different
configurations), and software pipelining (possibly different configurations) and
collect performance data form the simulator.
5.
Report performance at
all levels after collecting the execution time as the number of clocks. Compare
performance for each restructuring approach, and present your discussion and
justification.
6.
Suggest formal
restructuring rules for loop unrolling and software pipelining.
7.
Write a the program
for a tool that takes a loop with a few statement in the body as input and (1)
carry out data dependence analysis, (2) check the profitability of loop
unrolling and software pipelining under specific dependence conditions, (3)
restructure the loop using unrolling and / or software pipelining, (4) run the
resulting loops on DLX and show the results.
For the first four weeks the
students carry out (1) Surveying of I-pipelining techniques in at two recent
micro-architectures, (2) review of dynamic execution models, (3) methods of
resolving hazards, and (4) compiler techniques to improving ILP. The suggested
plan is: (1) Surveying of I-pipelining techniques in recently proposed
micro-architectures (last ten years), (2) how structural, data, and control
hazards are resolved and at what level, (3) main proposed features like
branch-prediction, speculation, etc., (4) provide a comparison of these
micro-architectures with respect to major aspects especially expected
performance and limitations. Implement a branch-prediction table with 2-bit
history and evaluate performance by using typical loop structures. The students
will prepare for a presentation within four weeks.
Select one of the following
implementations:
1.
Select one branch
prediction algorithm from a recent research paper and implement it. Carry out
performance evaluation by using a statistically generated branch behavior. For
example, the probability of some instruction to be a CB is 0.2 and that the
branch has a Set of statistical T/NT patterns (for example pattern 1110010101
prob. taken is 0.6). Evaluate performance of the used branch prediction and
suggest some improvement.
2.
Select one correlating
branch prediction algorithm from a recent research paper and implement it. Carry
out performance evaluation by using a statistically generated branch behavior.
For example, set up a a set of correlation rules between 3 or more CBs that are
hidden to the computer. Each correlation element indicate the T/NT of each of
the CBs. You may randomly a given element at a start of first CB. The problem is
to evaluate the performance of the algorithm when the set correlated branches
behaves as above. Study performance (correct prediction as compared incorrect
ones) and suggest some algorithm tuning.
The student is recommended to:
·
Carry out literature
survey using papers from the IEEE digital library and the Internet. Papers from
this folder are
old and should be avoided as main reference papers.
·
The previous student
papers Folder
including the student report with his presentation and the two reference papers references.
This means that the current students grades will depend on on the improvement,
surplus work, and innovation they provide as compared to the provided student
references and code.
·
The student is
recommended to implement a correlating branch predictor to improve the
performance as compared to the previously implemented scheme (see item above).
·
The student is
recommended to carry out following tasks:
· Task-1: carefully read (1)
the class presentation, (2) the book, and (3) New references papers as well as
those used by the previous student (see Folder above). Literature survey should
be done basically on new papers.
· Task-2: Analyze the
provided student implementation (code, presentation, and report): generation of
branching cases, test program, collecting results. The student work is expected
to noticeably improve the technical level of the current student approach and
implementation. It is also expected that the student will implement the various
schemes that will be presented in the lecture. The student work and grade will
be based on improvement, surplus work, and innovative ideas presented as
compared to the provided student work, implementation, and results.
7- Some additional course
projects can be offered with the following titles: Performance Evaluation of a
few Dynamic Brach Prediction Methods,
Design of a Speculative Dynamic Execution Unit and performance
evaluation, etc.
In Chip Multiprocessors (CMPs),
maintaining cache coherence can account for a major performance overhead.
Write-invalidate protocols adapted by most CMPs generate high cache-to-cache
misses under producer-consumer sharing patterns. To reduce coherence misses
observed in write-invalidate based protocols we may study a dynamic write-update
mechanism augmented on top of a write-invalidate protocol. This mechanism is
specifically triggered at the detection of a producer-consumer sharing pattern.
Secondly, we may extend this adaptive protocol with a bandwidth-adaptive
mechanism to eliminate performance degradation from write-updates under limited
bandwidth.
Adaptive Cache Coherence
Protocol aims at exploring mechanisms that improve shared memory performance by
eliminating remote misses and/or reducing the amount of communication required
to maintain coherence. Some approaches focuses on improving the performance of
applications that exhibit producer-consumer sharing. One is to explore simple
hardware mechanism for detecting producer-consumer sharing and then describe a
directory delegation mechanism whereby the "home node" of a cache line can be
delegated to a producer node, thereby converting 3-hop coherence operations into
2-hop operations. This will extend the delegation mechanism to support
speculative updates for data accessed in a producer-consumer pattern, which can
convert 2-hop misses into local misses, thereby eliminating the remote memory
latency. Both mechanisms can be implemented without changes to the processor.
Evaluation of directory delegation and speculative update mechanisms using some
server benchmark programs that exhibit producer-consumer sharing using a
cycle-accurate execution driven simulator of a future 16-node SGI
multiprocessor. The above mechanisms reduce the average remote miss rate by
40%, reduce network traffic by 15%, and improve performance by 21%. Finally, we
may use Murphi to verify that each mechanism is error-free and does not violate
sequential consistency.
References: folder
Commodity graphics processing units (GPUs) have rapidly evolved to become high
performance accelerators for dataparallel computing. Modern GPUs contain CUDA of
arithmetic cores or processing units, capable of achieving TFLOPS for
single-precision (SP) arithmetic, and over 500 GFLOPS for double-precision (DP)
calculations. We have the following GPU cluster: Two High-density 4U GPU Tower
Workstation. Each has the following spec:
·
Dual-processor Haswell 6C Xeon E5-2620 v3 – C612 based server, 2.4 GHz, 15M,
8GT/s QPI (9.6 GT/s),
·
16x288-pin DDR4 DIMM slots, 16x32GB LRDIMM,
·
Motherboard interfacing: 4x PCI-E 3.0 x16 (4 GPUs or 4 MICs), one slot PCI-E 3.0
x8 (1 in x16), and one 1x PCI-E 3.0 x8 (FDR Card).
·
HDD, 8 x 3.5" 2TB SATA, 6Gb/s, 7.2k rpm, 64M,
·
NVIDIA PNY Quadro K620 2GB DDR3 PCIe 2.0 - Active Cooling, AOC-GPU-NVQK620
·
Four NVIDIA Tesla K80 24GBGDDRS PCIe 3.0 passive cooling,
·
GPU Kit. MCP-320-74701-0N-KIT
·
Cables 4x CBL-PWEX-0663 and 2000W Redundant Power Supply
The two servers are interconnected to each other using an infiniband card and
links. Thus, we have two cases: GPUs on one server may communicate directly
through PCIe and GPUs residing on different servers must communicate through
host and infiniband link. This is expected to have some differences in using
(pinned and pageable memory) and communication using MPI is likely to be
different. MPI is supported with
GPUDirect to work correctly as explained in the Introduction to CUDA-Aware MPI:
https://devblogs.nvidia.com/parallelforall/introduction-cuda-aware-mpi/
MPI communication works fine as far as the communicating GPUs are on the same
PCIe. Otherwise (through infiniband) it requires copying the data from Device
memory to Host and initiate the send through host-to-host memories.
Different method to communicate between the different GPUs is possible such as
by allocating pinned memory on the host. Then, this memory is mapped to each
kernel. If any kernel modifies this value, the modification is immediately
noticed in all the running kernels on any GPU (shared memory). You may learn
about this in this link:
http://stackoverflow.com/a/20171692
Also, it doesn't seem that this method affected the performance, which is good
(almost as if we don't use any communication). I tested the code both with and
without it. I got similar execution time. We cannot change the global memory for
a kernel only before it starts executing. So to communicate between multiple
GPUs, first we do the memory allocation and send the data between them, then we
launch the kernels. The method for sending data between two GPUs is
cudaMemcpyPeerAsync( void* dst_addr, int dst_dev, void* src_addr, int src_dev,
size_t num_bytes, cudaStream_t stream );
A good description is found on this slide: https://www.nvidia.com/docs/IO/116711/sc11-multi-gpu.pdf starting
on page 9.
This method is used to invoke a method on the host after a kernel finishes it's
execution. Using this we can send data between the GPUs or launch another
kernel, for example. I use it to print the result of a kernel after it finishes
its execution, in case it succeeds in finding a result.
To compile CUDA programs containing MPI calls __host__ functions I used this:
nvcc -I/usr/local/lib
-L/usr/local/lib/openmpi -lmpi program.cu -o program
where /usr/local/lib and /usr/local/lib/openmpi are the folders
where the files of the OpenMPI are located on the server. To execute this
program this is used:
mpiexec -np 8 ./program
where 8 is the number of processes we want to start. The only source available
for describing CUDA-Aware MPI is this:
https://devblogs.nvidia.com/parallelforall/introduction-cuda-aware-mpi/
As application to Multi-GPU computing are the following titles
1.
Multi-GPU MapReduce on GPU Clusters,
2.
Pipelined Multi-GPU MapReduce for Big-Data Processing
3.
Multi-GPU Volume Rendering using MapReduce
4.
Moim: A Multi-GPU MapReduce Framework
5.
A Review of CUDA, MapReduce, and Pthreads Parallel Computing Models
6.
Multi GPU Programming with MPI
7.
Exploring the Multiple-GPU Design Space
8.
Dynamic Load Balancing on Single- and Multi-GPU Systems
9.
Multi GPU Programming with MPI and OpenACC
10.
CUDA Multi-GPU Programming
11.
Data Partitioning on Multicore and Multi-GPU Platforms Using Functional
Performance Models
12.
On the programmability of multi GPU computing systems.
13.
Multi GPU Implementation of the Simplex Algorithm
14.
Effective Multi-GPU Communication Using Multiple CUDA Streams and Threads
(GPUDirect)
15.
Use of Multiple GPUs on Shared Memory Multiprocessors for Ultrasound Propagation
Simulations
16.
Solving Incompressible Two-Phase Flows on Multi-GPU Clusters
Forward Reservoir Simulation
(FRS) is based on linear algebra operations such as solving a linear system Ax=b
with multiple Right-Hand Side (m-RHS) equations (multiple Ax=bi to find solution
xi for each bi). The use of A=LU factorization some advantages. In this case,
the problem is to find matrices L and U that are lower and upper triangular
matrices. The steps for solving Ax=b are solving LUx=b by solving LV=b and
finding V, and finally solving V=Ux and finding x. The main idea is to record
the steps used in Gaussian elimination on A in the places where the zero is
produced. The objective is to develop an efficient implementation of Sparse LU
factorization solver with m-RHS in CUDA/Library for hepta matrix. A suggest
plan is as follows:
(1) Explore the
literature on GPU parallel implementation of the LU factorization on GPU
including exploring the availability of LU factorization in external libraries
like CUBLAS, CuSPARSE, MAGMA, CUSP, Alinea, MKL, etc.
(2) Since A is known
to be sparse hepta matrix, we need to explore the optimization of both storage
and run time overhead in the LU factorization.
(3) Explore ways to
minimize the effect of global synchronization in LU factorization as it has been
addressed in the literature.
(4) Using the
solution A=LU, optimize the solving of m-RHD by exploring partial computations
that can be shared among various RHDs.
Reference paper: References
to LU factorization for band diagonal
Note: LU factorization takes
longer time than iterative methods but provides exact solution. For this it is
not recommended to be used when approximating Non-Linear systems, where the
matrix coefficient varies and accuracy is not a prime objective compared to
speed. Thus the main interest is where the matrix remains constant.
An accurate model for
computational fluid dynamics (CFD) is through the solving of the Navier–Stokes
equations. The Lattice Boltzmann method (LBM) is based on a discrete equations
for solving and simulating the flow of a Newtonian fluid using a collision
model. It consists of subdividing the simulated 2D or 3D space into
volumes, each contains a number of particles set in some predefined directions,
and a streaming and collision processes across a limited number of particles.
Particles jump (lattice) from one volume to the neighboring ones. The intrinsic
particle interactions evince a microcosm of viscous flow behavior applicable
across the greater mass. LBM is a major simplification of the original
Navier-Stikes CFD for any incompressible fluid such as blood in vessels LBM
provides an asymptotic solution which is quite similar to the solution provided
by the accurate Navier-Stokes CFD system. The LBM algorithm is based on an outer
loop on simulation time, in which there is there are two fundamental phases: (1)
Bounce, and (2) Propagation. The project is to write an optimized CUDA program
to implement the LBM approach in 3D by considering some boundary conditions as
well as some initial conditions. A practical soft book is available with the
instructor as well as a sequential simulation program. A proposed plan is
to (1) explore papers on implementing LBM on GPUs including Nvidia library on
LBM simulation, (2) write optimized CUDA/GPU and C/openMp for LBM simulation,
(3) explore algorithm data-layout and parallelization issues on GPU and MIC, (3)
simulate some interesting cases in cooperation with some going on research at
ARAMCO and provide some 3D visualization of the results, and (4) compare
performance with others' published research. The student may search the
IeeExplore for papersa on LBM applications on GPUs.
Sample Application
Programs
The Matrix Multiplication
Matrix multiplication C = A * B:
for (i = 0; i < N; i++){
for (j
= 0; j < N; j++){
sum = 0;
for (k = 0; k < N; k++){
sum += A[i][k] * B[k][j];
}
C[i][j] = sum;
}
}
}
Jacobi Iterative Method
The Jacobi method is an
algorithm for determining the solutions of a system of linear equations with
largest absolute values in each row and column dominated by the diagonal
element. Each diagonal element is solved for, and an approximate value plugged
in. The process is then iterated until it converges. This algorithm is a
stripped-down version of the Jacobi transformation method of matrix
diagonalization. The method is named after German mathematician Carl Gustav
Jakob Jacobi.
The element-based formula is as
follows:
This equation can be used as an
iteration formula for each of the unknowns to obtain a better approximation.
Note that in the Jacobi method computing xk+1 from xk is a perfectly parallel
operation: each new element of xk+1 is computed using the values of xk. This can
be achieved by allocating new vector (new_x) to store updated values and then
copy this vector into x to be used in the next iteration.
#include <stdio.h>
#include <math.h>
#include <unistd.h>
#include <time.h>
#include <sys/time.h>
#include <math.h>
#define MAX_ITER 100
int N = 100;
int main(int argc, char
*argv[]){
if(argc
> 1)
N = atoi(argv[1]);
double
sum;
int i,
j, k;
double
a[N][N], x[N], b[N], new_x[N];
double
dtime=0.0;
struct
timeval stv, etv;
int
ssec, susec, esec, eusec;
for(i =
0; i < N; i++){
for(j = 0; j < N; j++)
a[i][j] = (i+j+1) * 1.0;
x[i] = b[i] = (i+j) * 1.0;
}
for(k =
0; k < MAX_ITER; k++){
for(i=0; i<N; i++){
sum = -a[i][i] * x[i];
for(j=0; j<N; j++)
sum += a[i][j] * x[j];
new_x[i] = (b[i] - sum)/a[i][i];
}
for(i=0; i < N; i++)
x[i] = new_x[i];
}
return
0;
}
Alternating Direction Implicit (ADI)
Sample
Alternating Direction Integration (ADI) C code.
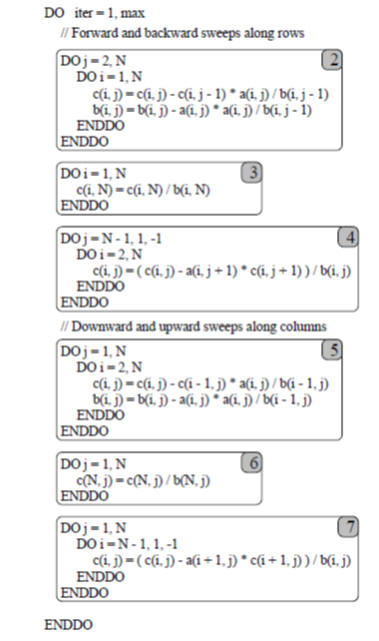
Fortran Code for ADI.
From “Automatic data layout for distributed-memory machines”, by Ken Kennedy
and Ulrich Kremer. Note loop 2 and 3 can be combined as well as 5 and 6 which
produces 4 major loops in the main body.
The Alternating Direction
Implicit (ADI) method is a finite difference method for
solving parabolic and elliptic partial differential equations. It is most
notably used to solve the problem of heat conduction or solving the diffusion
equation in two or more dimensions. The traditional method for solving the heat
conduction equation is the Crank–Nicolson method. This method can be quite
costly. The advantage of the ADI method is that the equations that have to be
solved in every iteration have a simpler structure and are thus easier to solve.
Sequential Implementation:
ADI implementation consists of
four loops L1, L2, L3 and L4. Loop L1 do forward sweep along rows and loop L2 do
backward sweep along rows. Loop L3 do forward sweep along columns and loop L4 do
backward sweep along columns.
#include <stdio.h>
#include <time.h>
#include <math.h>
#include <sys/time.h>
#define MAXITER 100
int N = 960;
int main(int argc, char
*argv[]){
if(argc
> 1)
N = atoi(argv[1]);
float
x[N][N], a[N][N], b[N][N];
int
i,j,k, iter;
double
dtime;
int
ssec, esec, susec, eusec;
struct
timeval tv;
for(i=0; i<N; i++)
for(j=0; j<N; j++){
x[i][j] = (i+j) * 1.0;
a[i][j] = (i+j) * 1.0;
b[i][j] = (i+j+1) * 1.0;
}
//***************ADI code: main
loop start****************************
//Outer Iterater
for(iter = 1; iter <= MAXITER;
iter++){
//////ADI forward & backword
sweep along rows//////
//L1: Starts
for (i = 0; i < N; i++){
for (j = 1; j < N; j++){
x[i][j] =
x[i][j]-x[i][j-1]*a[i][j]/b[i][j-1];
b[i][j]= b[i][j] -
a[i][j]*a[i][j]/b[i][j-1];
}
x[i][N-1] = x[i][N-1]/b[i][N-1];
}
//L2: Starts
for (i = 0; i < N; i++){
for (j = N-2; j > 1; j--){
x[i][j]=(x[i][j]-a[i][j+1]*x[i][j+1])/b[i][j];
}
}
////// ADI forward & backward
sweep along columns//////
//L3: Starts
for (j = 0; j < N; j++){
for (i = 1; i < N; i++){
x[i][j] =
x[i][j]-x[i-1][j]*a[i][j]/b[i-1][j];
b[i][j]= b[i][j] -
a[i][j]*a[i][j]/b[i-1][j];
}
x[N-1][j] = x[N-1][j]/b[N-1][j];
}
//L4: Starts
for (j = 0; j < N; j++){
for (i = N-2; i > 1; i--){
x[i][j]=(x[i][j]-a[i+1][j]*x[i+1][j])/b[i][j];
}
}
//***************ADI code: main
loop ends****************************
}
return
0;
}
THE OCEAN SIMULATION
The simplified version of the
solver in Ocean simulation is based on the Gauss-Seidel, near-neighbor sweeps
(iterations) with a convergence condition (statement 25) is shown below:
while (!done) do
/*outermost loop over sweeps*/
16.
diff = 0;
/*initialize maximum difference to 0*/
17.
for i ¬ 1 to n do
/*sweep over nonborder points of grid*/
18.
for j ¬ 1 to n do
19.
temp = A[i,j]; /*save old value of element*/
20.
A[i,j]¬0.2*(A[i,j]+A[i,j-1]+A[i-1,j]+A[i,j+1] + A[i+1,j]);
22.
diff += abs(A[i,j] - temp);
23.
end for
24.
end for
25.
if (diff/(n*n) < TOL) then done = 1;
26.
end while
Each array is assumed to be an
n*n. The drawback of the this algorithm is the Sweep O(n^2) computations and the
data dependencies which constrain its parallelization. A good approximation of
the above problem is the Red-Black sweeps which covert the above inner two loops
to:
(1) A double nested
“Red” loop (RL) to repeatedly process even numbered pixels in one row and odd
numbered pixels in the next row, etc
(2) A double nested
“Black” loop (BL) to repeatedly process odd numbered pixels in one row and even
numbered pixels in the next row, etc.
while (!done) do
/*outermost loop over sweeps*/
diff = 0; /*initialize maximum difference to 0*/
for i = 1 to n do /*Red Sweep over nonborder points*/
jstart = i mod 2; /*To
visit odd numbered pixels*/
for j = jstart to n do stride 2
temp = A[i,j]; /*save old value of element*/
A[i,j]= 0.2*(A[i,j]+A[i,j-1]+A[i-1,j]+A[i,j+1] + A[i+1,j]);
diff += abs(A[i,j] -
temp);
end for
end for
for i = 1 to n do /*Black sweep over nonborder points*/
jstart = i mod 2 +1; /*To visit even numbered
pixels*/
for j = jstart to n do stride 2
temp = A[i,j]; /*save old value of element*/
A[i,j] = 0.2*(A[i,j]+A[i,j-1]+A[i-1,j]+A[i,j+1] + A[i+1,j]);
diff += abs(A[i,j] -
temp);
end for
end for
if (diff/(n*n) < TOL) then done =
1;
end while